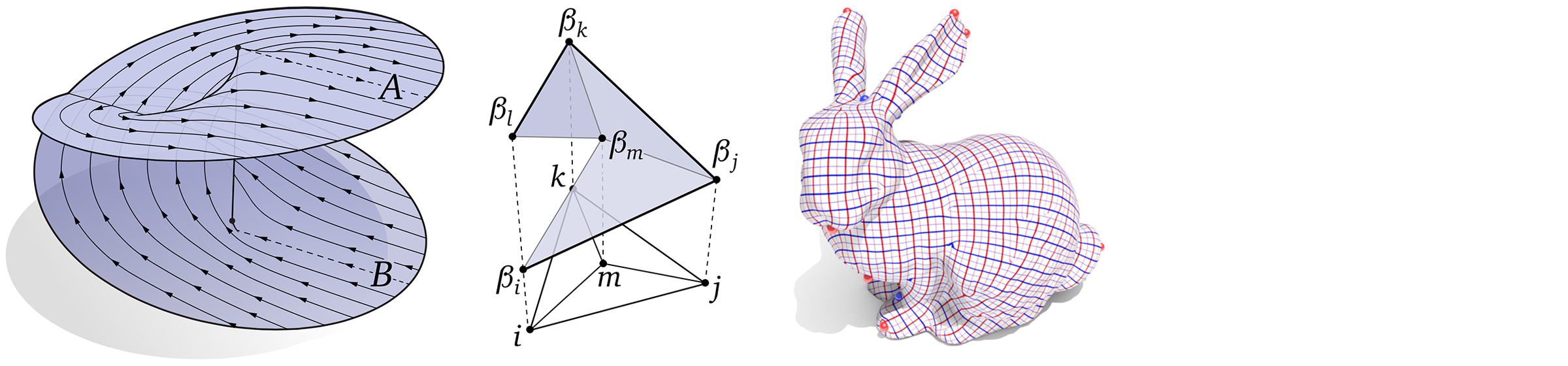
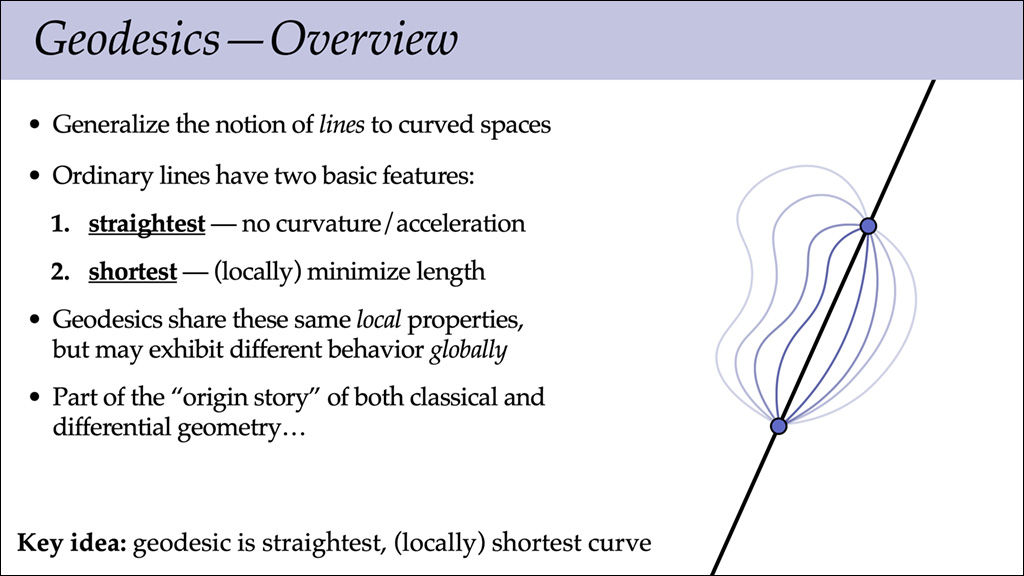
Our final lectures for the term focus on geodesics, which generalize the notion of “straight line” to curved spaces; this material also connects to your final assignment, on computing geodesic distance. Once again we’ll play “The Game” of discrete differential geometry, and see how two natural characterizations from the smooth setting (straightest and locally shortest) lead to two distinct, and fascinating definitions in the discrete setting. Along the way we’ll also encounter many rich topics from (discrete) differential geometry including the cut locus, the medial axis, the exponential/log map, the covariant derivative, and the Lie bracket! We’ll also see how all this stuff connects with practical algorithms for things like surface reconstruction from points, and give two different algorithms for tracing out geodesics on curved surfaces.
Note that the lecture video comprises about two lectures (about two hours total). If you need to watch the video instead of attending lecture (e.g., because you’re sick), we’d recommend watching it in two logical chunks:
- Part I: Shortest Geodesics – 0:00—1:04
- Part II: Straightest Geodesics – 1:04–1:55





